 >> Infokar >> 2.2. ES 2009.01., KG
>> Infokar >> 2.2. ES 2009.01., KG|
2.2. Az egyenes és a sík
egyenlete
|
2.2.0. Egysmás, amit tudni illik
•
- Egy egynes egyenlete olyan egyenlőség, amely az ilető egyenes pontjainak koordinátái teljesül, de az egyenesen kívüli pontokéra nem. Például: 3x + 4y = 6 egy egyenes egyenlete.
- Az egyenes (általános) egyenlete olyan paraméteres egyenlőség, amely a paraméterek minden valós értékére valamely egyenes egyenlete, és fordítva, minden egyenes egyenlete megkapható így.
- Megjegyzendő, hogy az y = mx+b alakú, "iskolás"
egyenlet ugyan minden (m,b) számpárra valamilyen egynes egyenlete, de
fordírva, nem minden egyeneshez található ilyen számpár. Például az x
tengelyt x=3-nál metsző és az y tengellyel párhuzamos egyenes egyenlete
nem írható ilyen alakban.
- ax + by + c < 0 : egy félsík egyenlőtlensége
- y = f( x ) és z = g( x, y ) : explicit (kifejezett) egyenletek
- h(
x, y ) =
0,
: implicit (nem explicit, nem kifejezett) egyenlet
Ilyen például a kör egyenletének x2 + y2 -1 = 0 alakja - x = u( t ), y = v( t ); a ≤ t ≤ b : paraméteres egyenletrendszer
Ilyen például a kör x = r ∙ cos t, y = r ∙ sin t ; 0 ≤ t ≤ 2π egyenlete
Ilyen x = r ∙ cos t, y = r ∙ sin t, z = v ∙ t ; 0 ≤ t < T (egy csavarvonal egyenletrendszere)
- És néhány alapismeret az euklideszi térben (E3) és az euklideszi síkon (E2):
•
- •Két pont egyértelműen meghatároz egy egyenest (E2 és E3)
- Egy egyenest egyértelműen meghatározza egy pontja és egy irányvektora (E2 és E3)
- Egy egyenest egyértelműen meghatározza egy pontja és egy normálvektora (E2)
- Egy síkot egyértelműen meghatározza egy pontja és egy normálvektora (E3)
- Három pont egyértelműen meghatároz egy síkot (E3)
- Egy sík egy normálvektora merőleges a sík minden egyenesére
- Egy pontból kiinduló két vektor egyértelműen kifeszít (meghatároz) egy síkot (E3) …
2.2.1. Az egyenes egyenlete
Egy egyenes egyenlete
különböző formákban adható meg, amelyek
két, egymástól lényegesen
különböző alakra vezethetők vissza.
Az
egyenes
paraméteres egyenlete 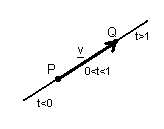
Egy
egyenest meghatároz -- a térben kijelöl
-- két pontja. Egy program adatai között egy egyenes reprezentálható
-- tárolható -- két pontjának
koordinátáival. Geometriai
számítások során
fölhasználhatjuk a két adott ponton átmenő egyenes egyenletét.
Két pontjával (P és Q) adott egyenes minden X pontjára:
X = P + t · (Q - P), azaz: X = (1 - t) · P + t · Q, |
valamilyen t valós számmal. Minden valós t érték egyértelműen meghatározza az egyenes egy pontját, és fordítva is: az egyenes minden pontjához tartozik egy valós t érték. (Ez az egyenlet a síkban és a térben egyaránt használható - a továbbiak csak a síkban.)
A pontok helyvektorainak összetevőivel hasonlóan:
x
= px
+ t · (qx - px),
vagy
átrendezve: x
= (1-t) · px
+ t · qx,
y = py + t · (qy - py), vagy átrendezve: y = (1-t) · py + t · qy , és a térben:
z = pz + t · (qz - pz), vagy átrendezve: z = (1-t ) · pz + t · qz
y = py + t · (qy - py), vagy átrendezve: y = (1-t) · py + t · qy , és a térben:
z = pz + t · (qz - pz), vagy átrendezve: z = (1-t ) · pz + t · qz
A t = 0-hoz a P, t = 1-hez a Q, 0 < t < 1 esetén a PQ szakasz pontjai, míg t<0 és 1<t esetén a szakaszon kívüli pontok.
Egyenlőközű t sorozat esetén geometriailag is egyenlőközű pontsorozatot kapunk az egyenesen.
Ebben az egyenletben t és 1-t az X pont baricentrikus koordinátái az egyenes P és Q alappontjaira vonatkozóan.
A v = Q - P jelöléssel v = (vx, vy, vz) = (qx - px, qy - py, qz - pz) az egyenes egy irányvektora. Ezzel az egyenes paraméteres egyenlete X = P + t · v alakban írható, illetve az összetevőkre: x = px + t · vx , y = py + t · vy , és a térben: z = pz + t.
A t = 0 a P pontot, pozitív x-ekre az irányvektor irényában, negatívokra az ellenkező irányban lévő pontokat kapunk.
Az
egyenes
normálegyenlete (a síkban)
 Egy egyenest a síkban meghatározza egy pontja és állása. Az egyenes
állását legtöbbször egy normálvektorával -- az egyenes
állására merőleges vektorral -- adjuk
meg. (A térben az egyenes állását egy rá merőleges vektor nem
határozza meg!)
Egy egyenest a síkban meghatározza egy pontja és állása. Az egyenes
állását legtöbbször egy normálvektorával -- az egyenes
állására merőleges vektorral -- adjuk
meg. (A térben az egyenes állását egy rá merőleges vektor nem
határozza meg!)
A síkban elhelyezkedő P
= (px,
py)
ponton átmenő, és az n
= (nx, ny) vektor állására
merőleges egyenes
tetszőleges X
= (x, y)
pontjára: (X - P) · n = 0, illetve a koordinátákkal: (x - px) · nx + (y - py) · ny = 0 |
Ugyanis az egyenesen lévő PX vektor merőleges az egyenes normálisára, ezért ezek saklárszorzata 0. Az egyenletet átrendezve:
X ·
n
= P · n,
illetve
a
koordinátákkal: x
· nx
+ y · ny
= px · nx + py
·
ny
Egy egyenes két
félsíkra osztja a síkot. Ha a
sík egy X’ pontja
a P
pont és az n
normális által meghatározott
egyenesen kívül, az n
vektor irányával egyező
oldalán van, akkor (X’
- P) · n
> 0,
illetve ha az egyenes másik oldalán van, akkor ez
<
0. Ezt
a két
egyenlőséget nevezhetjük az egyenesünk
által meghatározott két
félsík
egyenlőtlenségének.
Az
egyenes
normálegyenletének homogén,
implicit alakja (a síkban)
A normálegyenletből az a = nx, b = ny és c = - (px · nx + py · ny) jelöléssel:
| a · x + b · y + c = 0; a2+b2 ≠ 0 (azaz a és b nem mindkettő nulla) |
Itt a és b az egyenes egy normálvektorának összetevői. Az (a,b,c) számhármast az egyenes vonalkoordinátáinak nevezzük. Arányos számhármasok ugyanazt az egyenest jelentik. Egy síkbeli egyenes megadható (tárolható) vonalkoordinátáival.
Az a és b négyzetösszegének négyzetgyökével (nem nulla!) osztva kapjuk az egyenlet Hesse-féle normál alakját:
a'
· x + b'· y + c'= 0;
a'2+b'2 =
1
x
/ a"
+ y / b" = 1; Ha a és b nem nulla., b" ≠ 0
ahol a" = -c / a, b" = -c / baz egyenes és az X, illetve Y tengely metszéspontjának összetevője. Ez az alak nem tekinthető az egyenes általános egyenletével, mert tengellyel párhuzamos egyenes egyenlete nem írható ilyen alakban.
A
egyenes "iskolás egyenletei" (a síkban - ti)
Az én időmben az iskolában az egyenes egyenletét így tanultuk:
y = M · x + B;
ahol M az egyenes meredeksége, B pedig az y tengellyel való metszés helye, Ez azonban nem nevezhető az egyenesek általános egyenletének, mert a „függőleges”, azaz az y tengellyel párhuzamos egyenesek egyenlete nem írható így. (Azok egyenlete: x = konstans.) Ezt az egyenletet nyilvánvalóan a homogén implicit egyenletből kapjuk b-vel osztva, ha b ≠ 0: M = -a/b, B = -c/b.
Általánosan használható viszont az egyenes egyenlete az adott (x1, y1) és (x2, y2) pontokon át:
(x2 - x1) · (y - y1) = (y2 - y1) · (x - x1).
A
homogén
implicit egyenlet
determináns alakja
(a síkban)
A
síkban adott három pont, X = (x, y), P
= (px,
py)
és Q =
(qx,
qy)
által alkotott háromszög területének kétszerese:2
· T(XPQ) = |
x y 1 |
| px py 1 |
| qx qy 1 |
| px py 1 |
| qx qy 1 |
A determináns értéke a három pont (P,Q,X) által alkotott háromszög területének kétszerese; ha a három pont egy egyenesbe esik, akkor a terület nulla. Három pont, akkor és csak akkor van egy egyenesen, ha a koordinátáikkal képzett fenti determináns értéke nulla. Ebben az esetben a determinánst első sora szerint kifejtve a homogén egyenlet együtthatóit kapjuk:
x
· (py - qy) + y
· (qx - px) + (px
· qy - py
· qx) = 0.
ami x · a + y · b + c = 0 alakú. Miután (px-qx) és (py-qy) az egyenes egy irány- vektorának összetevői, (py-qy) és (-px+qx) egy normálvektor összetevői (mint a homogén implicit egyenletben a és b is).
? Gyakorlati
számítások
Ehhez a fejezethez a tanultak gyakorlása céljából három fájlt készítettünk. Ezek tartalma részben átfedő, később ezt majd tisztába tesszük. A három fájl:
Képeletek összefoglalása ("kispuska"): G22-X1-E-es-S-osszefoglalo.html
Számítási feladatok: G22-X2-E-es-S-SzamitasiFeladatok.html
További gyakorló feladatok: G22-X3-E-es-S-Gyakorlo-Feladatok-olv.html
A sík egyenlete
különböző formákban adható meg, amelyek
két, egymástól lényegesen
különböző alakra vezethetők vissza.
A sík paraméteres egyenlete:
A síkot
meghatározza három nem kollineáris
pontja. (Három pontot
kollineárisnak mondunk,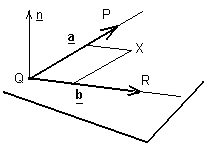 ha egy egyenesbe esnek. Ellenkező
esetben azt mondjuk, hogy nem-kollineárisak, illetve
hogy kifeszítenek egy síkot.) Egy program
adatai között egy sík reprezentálható
-- tárolható -- három pontjának
koordinátáival. Geometriai
számítások során
fölhasználhatjuk a három adott ponton átmenő
egyenes egyenletét.
ha egy egyenesbe esnek. Ellenkező
esetben azt mondjuk, hogy nem-kollineárisak, illetve
hogy kifeszítenek egy síkot.) Egy program
adatai között egy sík reprezentálható
-- tárolható -- három pontjának
koordinátáival. Geometriai
számítások során
fölhasználhatjuk a három adott ponton átmenő
egyenes egyenletét.
ha egy egyenesbe esnek. Ellenkező
esetben azt mondjuk, hogy nem-kollineárisak, illetve
hogy kifeszítenek egy síkot.) Egy program
adatai között egy sík reprezentálható
-- tárolható -- három pontjának
koordinátáival. Geometriai
számítások során
fölhasználhatjuk a három adott ponton átmenő
egyenes egyenletét.X = (x, y, z) pontja elérhető a például a Q pontból a QP és QR vektorok megfelelő súlíozott összegével:
X = Q + s· (P - Q) + t · (R - Q), azaz: X = (1 - s - t) · Q + s · P + t · R, |
x
= qx + s · (px -
qx) + t · (rx
- qx) = (1 - s - t) · qx
+ s · px +
t · rx,
y = qy + s · (py
- qy) + t ·(ry
- qy) =
(1 - s - t) · qy
+ s · py+ t · ry,
z = qz + s · (pz -
qz) + t · (rz -
qz) = (1 - s - t) · qz
+ s · pz
+ t · rz,
Az s, t és 1-s-t számok a pont baricentrikus koordinátái a síkban a P,Q,R pontokra vonatkozóan.
Az u = (P - Q) és v = (R - Q) helyettesítésekkel az egyenlet X = P + s · u + t · v alakra hozható, illetve a koordinátákra: x = px + s · ux + t · vx, y = py + s · uy + t · vy, z = pz + s· uz + t · vz .
 A
sík normálegyenlete
A
sík normálegyenlete
A síkot
meghatározza egy pontja és
állása is. A sík
állását
meghatározhatja egy normálvektora, vagy
két, nem egyállású vektora
(amelyek tehát kifeszítik a síkot),
vagy három nem kollineáris pontja.
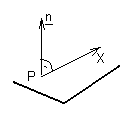
n = (nx,ny,nz) normálvektorával (ez utóbbi hossza tetszőleges lehet). A sík tetszőleges X pontjával az X - P (a P-ből az X-be húzott) vektor merőleges a normálvektorra, ezért:
(X - P) · n = 0, azaz (x - px) · nx + (y - py) · ny + (z - pz) · nz = 0 |
illetve átrendezve:
X · n = P · n, azaz x · nx + y · ny + z · nz = px · nx + py · ny + pz · nz
A
sík egyenletének homogén, imlicit alakja
a · x + b · y + c · z + d = 0; a, b és c nem mind nulla |
Az a, b és c négyzetösszegének négyzetgyökével (nem nulla!) osztva kapjuk az egyenlet Hesse-féle normál alakját: a' · x + b' · y + c'· z + d’= 0; a'2+b'2+c'2 = 1, illetve átrendezéssel kapjuk a sík Salmon-féle tengelymetszetes alakot:
x / a" + y / b" +
z / c" = 1; a, b és c egyike sem nulla
Itt a" = -d / a, b" = -d / b, c" = -d / c a sík és a tengelyek metszéspontjának összetevői. (Ez az alak így nem "általános egyenlete a síknak", mert ha egy sík párhuzamos egy (vagy két) tengellyel, akkor egyenlete nem írható így föl.
A
homogén egyenlet determináns alakja
| x
y
z
1
| = 0
| px py pz 1 |
| qx qy qz 1 |
| rx ry rz 1 |
| px py pz 1 |
| qx qy qz 1 |
| rx ry rz 1 |
A determinánst első sora szerint kifejtve x, y és z együtthatóiként a homogén egyenlet együtthatóit kapjuk
 a lap tetejére a lap tetejére |