 >> Infokar >> 2. KRTR
>> 2.3. 2011.03
>> Infokar >> 2. KRTR
>> 2.3. 2011.03 2.3. Az euklideszi tér projektív lezárása
|
Az euklideszi tér egy
„inhomogenitása”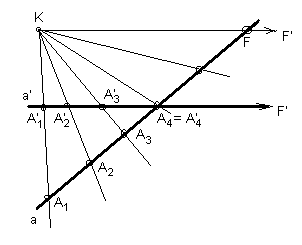

Ha az euklideszi síkban az a egyenes pontjait az X tengelyre vetítjük egy mindkettőn kívüli K pontból: az A, B, C, ... pontjain átmenő vetítősugarak az X tengelyen kimetszik az A’, B’, C’, ... vetületi pontokat. Az a egyenes minden pontjának megfelel egy vetületi pont, kivéve azt az F pontot, amelyen átmenő vetítősugár párhuzamos az X tengellyel.
A vetületi pontok az egyes vetítősugarak közös pontjai az X tengellyel. A KF vetítősugárnak és az X tengelynek azonban nincs közös pontja, csak az állásuk közös: párhuzamosak egymással.
Hasonló a helyzet, ha az euklideszi térben egy a sík pontjait vetítjük egy X síkra egy rajtuk kívül lévő K pontból. A sík azon pontjainál, amelyeken áthaladó vetítősugár párhuzamos az X síkkal, nem kapunk vetületi pontot az X síkon. Az ilyen vetítősugaraknak az X síkkal nincs közös pontjuk, de közös az állásuk az X sík egyik vele párhuzamos egyenesével.
Megszüntethető ez a kivételes helyzet, ha párhuzamos egyenesek egyező állását is „pontnak” nevezzük. Természetesen, ennek az önkényes elnevezésnek csak akkor van értelme, ha az így kapott geometria „értelmesen” használható. Szerencsére ez a helyzet.
Az ideális pontokkal
kibővített
euklideszi tér
Az E3 euklideszi teret, a tér pontjainak halmazát "kibővítjük" további pontokkal, és így definiáljuk a kibővített H3 teret, amelynek kétféle pontja van: "közönséges" pontjai egyértelműen megfelelnek E3 pontjainak, illetve meghatározott módon definiált többi pontját "ideális" (csak ideákban létező) pontoknak nevezzük:
- a tér minden egyenesének közönséges pontjain kívül még egy pontot tulajdonítunk, amelyet az illető egyenes ideális pontjának nevezünk,
- egymással párhuzamos egyenesek ideális pontja megegyezik, és ez az egyenesek közös állását jellemzi (ami egy közös irányvektorral is jellemezhető),
- egy
sík
ideális
pontjainak halmazát az illető sík
ideális egyenesének nevezzük,
- a
tér
ideális
pontjainak halmazát a tér ideális
síkjának nevezzük.
- párhuzamos
síkok
ideális egyenese megegyezik,
- minden sík ideális egyenese -- és ezekkel minden ideális pont -- a tér ideális síkjában van.
Homogén
koordináták egy
derékszögű koordináta-rendszerben
Az
euklideszi tér
pontjai a tér egy közönséges
pontjához rögzített DKR-ben
valós
számhármasokkal
adhatók meg. Az euklideszi tér valódi
részhalmaza a kibővített
térnek, az
utóbbi pontjainak
megadására három koordináta
kevés.A kibővített tér egy közönséges pontjához rögzített DKR-ben
- egy (x, y, z) koordinátájú közönséges pontnak megfeleltetjük az [x, y, z, 1] homogén koordinátákat, illetve az ezzel arányos számnégyesek mindegyikét (ezen arányos számnégyesek ekvivalencia-osztályát):
- A
kibővített térben egy (x1, x2, x3) irányvektornak
megfelelő ideális pontnak
a [x1,
x2, x3, 0]
homogén koordinátákat feleltetjük meg, illetve
az ezzel arányos számnégyesek
mindegyikét
(ezen
arányos számnégyesek
ekvivalencia-osztályát):
=> [x1, x2, x3, 0] ≈ h · [x1, x2, x3, 0] = [h · x1, h · x2, h · x3, 0]; h ≠ 0.
Fordítva, ha [x1, x2, x3, x4] a kibővített tér egy pontjának homogén (-koordinátás) alakja, és
- ha x4 ≠ 0, akkor ez „közönséges pont”, és Descartes-koordinátáit így kapjuk:
- ha x4 = 0, de x1, x2, x3 nem mind nulla, akkor [x1, x2, x3, 0] ideális pont (az euklideszi térben pontként nem létezik), és az erre illeszkedő egyenesek párhuzamosak az (x1, x2, x3) vektorral.
- végül [0, 0, 0, 0] nem pont (algoritmusaink eredményeként nem állhat elő).
Minden pontnak több számnégyes is megfelel, amelyek az egymással arányos számnégyesek egy ekvivalencia osztályát alkotják.
Műveletekben egy pontot az egymással arányos négyesek közül bármelyik képviselheti. Az egymással arányos számnégyesek közül normált alakúnak (röviden normáltnak) nevezzük azt, amelyben x4 = 1, illetve ideális pontoknál azt, amelyben a többi koordináta négyzetösszege 1 (ekkor ezek a rá „illeszkedő” egyenesek irány-koszinuszai).
Az ideális pontok homogén alakjának koordinátai közül az utolsót, a nullát elhagyva, a többiek az illető ideális pontra illeszkedő (azon "átmenő") egyenesek egy irányvektorának koordinátai (a normált alakban egységvektor). Az ideális pontok normált alakja kétértelmű: [x1, x2, x3, 0] és [-x1, -x2, -x3, 0]; minden egyenesnek két, egymással ellentétes irányvektora van.
Néhány
nevezetes pont homogén
koordinátái
Bármilyen
c ≠ 0
számmal
-
[0, 0, 0, c]T az origó homogén alakja,
-
[c, 0, 0, 0]T, [0, c, 0, 0]T, [0, 0, c, 0]T az X, Y ill. Z tengely ideális pontja
-
az YZ (x = 0) koordináta-sík pontjai: [0, y, z, h]T,
-
az XZ (y = 0) koordináta-sík; pontjai: [x, 0, z, h]T,
-
az XY (z = 0) koordináta-sík; pontjai: [x, y, 0, h]T.
„Homogén terünk” szerkezete (olvasmány)
Adott x, y, z, w ∈ R valós számok esetén a [x, y, z, w] számnégyessel arányos számnégyesek ekvivalencia-osztályt alkotnak (az "arányos" relációra vonatkozóan):
Ax,y,z,w = { [ x·h, y·h, z·h, w·h ]; x, y, z, w, h ∈ R, h ≠ 0}
Az E3 projektív lezárásával kapott homogén tér az ilyenek halmazával izomorf kivéve a [0, 0, 0, 0] egyetlen elem ekvivakencia-osztályát):
H3 ≅ {Ax,y,z,w ; x, y, z,w ∈ R} \ { A0,0,0,0}
A homogén
koordináták használata
A
homogén-koordináták
használata a
számításokban föloldja a
nem metsző
párhuzamosok „kivételes”
helyzetét, és a
mátrix-szorzáson
keresztül
egységes
formalizmust nyújt a geometriai
transzformációk algoritmikus
végrehajtásáhozA következő fejezetekben látni fogjuk, hogy a grafikában használt affin és projektív transzformációkban pontok homogén alakját szorozzuk 4x4-es mátrixokkal, és az egymásutáni transzformációk mátrixuk szorzatával adhatók meg.
A gyakorlatban geometriai feladatainkat a szokásos módon Descartes- koordinátákkal fogalmazzuk meg, és az eredményeket ugyanígy várjuk. Ha a számítások során valamihez homogén koordinátákra van szükségünk, akkor
- előbb
áttérünk
homogén koordinátákra: a pontok
Descartes-koordinátáihoz
hozzáírunk még
egy, 1
értékű koordinátát,
- ezekkel végrehajtjuk a kívánt műveleteket,
- majd az eredmények értékelése előtt a koordináták arányos átalakításával visszatérünk Descartes-koordinátákra (az utolsó, homogén koordinátával osztjuk a többit).
A
kibővített sík egy egyszerű
szemléltetése (olv)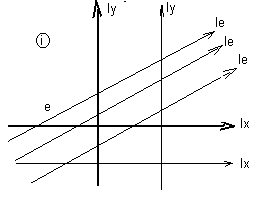
A
szemléletes
ábrázolás mindig megszokott
konvenciók
kérdése. Megállapodhatunk
például abban,
hogy a kibővített sík
közönséges
részét ugyanúgy
ábrázoljuk, ahogy
megszoktuk. Az
ideális pontokat egyenesük
végére tett
nyílheggyel jelöljük, a sík
ideális
egyenesét pedig – nem tudván sehova
„méretarányosan” elhelyezni
–
egy
bekarikázott i betűvel jelöljük valahol az
ábrán, jelezve, hogy "ő is
van". A koordináta-tengelyek végére rejzolt nyílhegy képviselheti a
tengely ideális pontját is; bár ennek eredeti jelentése: a koordináták
növekedésébnek irányát jelzi.Kis képzelőerővel egy ilyen ábra tekinthető a kibővített tér metszetének is a z = 0 síkkal.
A projektív sík modellje minden olyan konstrukció, amelyben a sík különböző elemeinek és az ezek közötti viszonyoknak (relációknak) kölcsönösen egyértelmű megfelelőt definiálunk. Ilyenek: a projektív sík 3D euklideszi geometriai modellje, félgömb- és gömb modellje, nyílt körlemez modellje, stb. Ezekkel kapcsolatban az irodalomra utalunk.
A kibővített
tér néhány
tulajdonsága (olv)
- A projektív síkon a pont és az egyenes, a projektív térben a pont és a sík duális fogalmak. (L. Projektv geometria.)
- A projektív síkban (térben) négy (öt), hármasával nem kollineáris pont kijelöl egy projektív koordináta-rendszert, amelyre vonatkozóan a sík (tér) pontjai egyértelműen jellemezhetők három (négy) projektív koordinátájukkal.
- A projektív térben egy pontra illeszkedő egyeneseket sugársornak, egy egyenesre illeszkedő pontokat pontsornak, egy egyenesre illeszkedő síkokat síksornak nevezzük. A kibővített tér egy ideális pontjára illeszkedő sugársor elemei, illetve egy ideális egyenesre illeszkedő síkjai a tér közönséges (euklideszi) részében egymással párhuzamosak.
- Az euklideszi térben az
egyenest egy
pontja (a síkot egy egyenese, a teret egy
síkja) két részre osztja.
- A kibővített térben az egyenest egy pontja nem osztja két félre; az egyenes ideális pontján keresztül mindkét irányban „körbejárható”. Az egyenes pontjaira jellemző „ciklikus sorrendjük”.
- Az egyenest két pontja ketté osztja, amelyek közül az egyik tartalmazza sz ideális pontot.
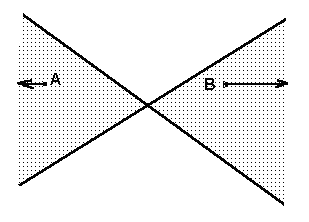 Hasonlóan a síkot két egyenese, a teret két síkja ketté osztja. A
síkban egy közönséges ponton átmenő két egyenes két darab "kettős
kúpra" osztja a síkot (az ábrán az A és B pontok egyenesük ideális
pontján keresztül összeköthetők). Ugyanígy két részre osztja a
síkot egy ideális ponton átmenő két egyenes (az euklideszi
részben párhuzamosak). Egy egyenes "két oldala csak úgy értelmezhető,
mint az egyenes és a sík ideális egyenese áltak "közrezárt" két félsík!
Hasonlóan a síkot két egyenese, a teret két síkja ketté osztja. A
síkban egy közönséges ponton átmenő két egyenes két darab "kettős
kúpra" osztja a síkot (az ábrán az A és B pontok egyenesük ideális
pontján keresztül összeköthetők). Ugyanígy két részre osztja a
síkot egy ideális ponton átmenő két egyenes (az euklideszi
részben párhuzamosak). Egy egyenes "két oldala csak úgy értelmezhető,
mint az egyenes és a sík ideális egyenese áltak "közrezárt" két félsík!
Az egyenes és sík egyenletének homogén alakja
- A
kibővített síkban
egy egyenese megadható egy valós számhármassal:
e = [e1, e2, e3], és az egyenes tetszőleges X = [x1, x2, x3]T pontjára:
e · X = [e1, e2, e3] · [x1, x2, x3]T=
e1·x1 + e2·x2 + e3·x3
= 0
-
Az [e1, e2, e3] számhármast az egyenes „vonalkoordinátáinak” nevezzük. Ezeket éppúgy meg lehet szorozni egy nullától különböző számmal, mint a pontok homogén koordinátáit.
- A fenti egyenletű e = [e1, e2, e3] egyenes ideális pontja: Ie = [ e2, _ e1, 0].
-
Ez az egyenlet az egyenesek korábban bemutatott "homogén implicit egyenletének" általánosítása úgy, hogy az egyenes ideális pontjára is teljesüljön. (Ha közönséges pontok esetén a nullától különböző x3 együtthatóval osztjuk az egyenlet mindkét oldalát, az egyenes „közönséges” homogén egyenletét kapjuk.)
Annak az egyenesnek, amely a sík minden [x1, x2, 0]T ideális pontjára illeszkedik, a vonalkoordinátái nyilván [0,0,1]. Ez a sík ideális egyenesének homogén alakja.
-
Az e egyenesen kívüli X pontokra az e ·X skalárszorzat nem nulla. Az egyenes "egyik oldalán" az (e ·X) · sign(x3) előjele pozitív, a másikban negatív. (A sign(x3) tényező azért kell, mert X és –X ugyanaz a pont! Az "egyenes egyik oldala" kifejezésre még visszatérünk.)
A sík egyenletének
homogén-koordinátás alakja
- A
kibővített tér
egy síkja megadható egy valós számnégyessel: s = [s1, s2, s3, s4],
és a sík valamennyi X = [x1, x2, x3, x4]T
pontjára:
s · X = [s1, s2, s3, s4] · [x1, x2, x3, x4]T=
s1·x1 + s2·x2 + s3·x3 + s4·x4
= 0
Az [s1, s2, s3, s4]
számnégyest a sík „síkkoordinátáinak” nevezhetjük. A síkkoordinátákat
éppúgy meg
lehet szorozni egy nullától különböző számmal, mint a pontok homogén
koordinátáit.
(Közönséges pontok esetén a nullától különböző x4
összetevővel
osztva a sík „közönséges” homogén egyenletét kapjuk.)
-
Az s síkon kívüli X pontokra az s·X skalárszorzat nem nulla. A sík egyik oldalán (t.i. a sík és a tér ideális síkja által közrezárt egyik féltérben) az (s·X)·sign(x4) előjele pozitív, a másikban negatív. (X és –X ugyanaz a pont!)
- Az egyenes és a sík paraméteres egyenlete a kibővített térben az ideális pontokra nem használható.
 a lap tetejére a lap tetejére |